
Research
Calls for projects Spring 2024
The "Research" and "PhD position" calls for projects are open until May 03rd.
The "Research" and "PhD position" calls for projects are open until May 03rd.
PhD extension call for ITI IRMIA++ students - Apply before May 31st !

New article on the DU IRMIA++ students' journal
New article on the DU IRMIA++ students' journal

The "Research" and "PhD position" calls for projects are open until May 03rd.

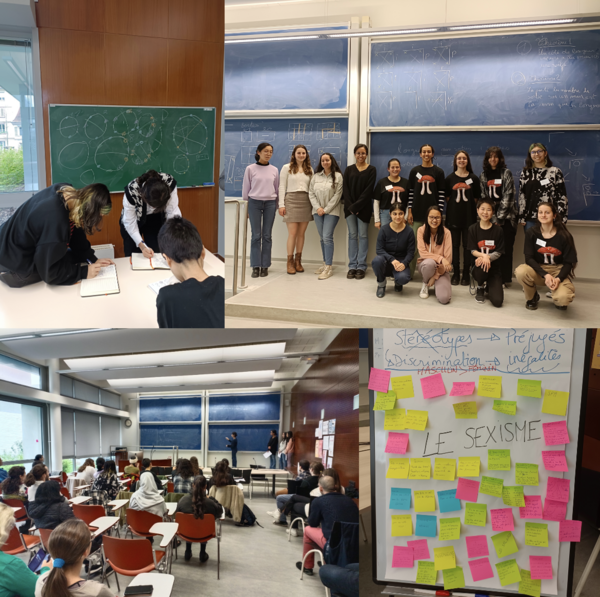
The mathematician gave a talk in two amphitheatres at Le Patio on Monday, December 18, to high school students from the…


Du 26 au 28 avril 2024

1-6 July 2024, Strasbourg
Visit the DU IRMIA++ students' journal
Visit the DU IRMIA++ students' journal
Visit the DU IRMIA++ students' journal